To evaluate the diesel-electric parallel hybrid drive, first the measured cycles and the legislative cycle for determining the reference levels with the test engine in purely diesel engine operation were measured on the test bench. This was followed by investigations with the hybrid drive and the different operating strategies. The results of this research project were able to show that a diesel-electric parallel hybrid drive in mobile implements can save up to 10 percent fuel while comlying to legal requirements. From an economic point of view, the additional costs for the more complex drive and the effectively possible savings in operating costs in the area of mobile work machines will determine to what extent hybrid drive solutions are accepted by customers.

Hybrid Powertrain Operation Strategy

As part of the FFG-funded research activities presented here, different operating strategies for a parallel hybrid drive concept for non-road applications under customer-relevant application profiles were developed and investigated. The evaluation was carried out with regard to reducing fuel consumption and CO2 emissions and emissions in order to comply with the current legal framework.
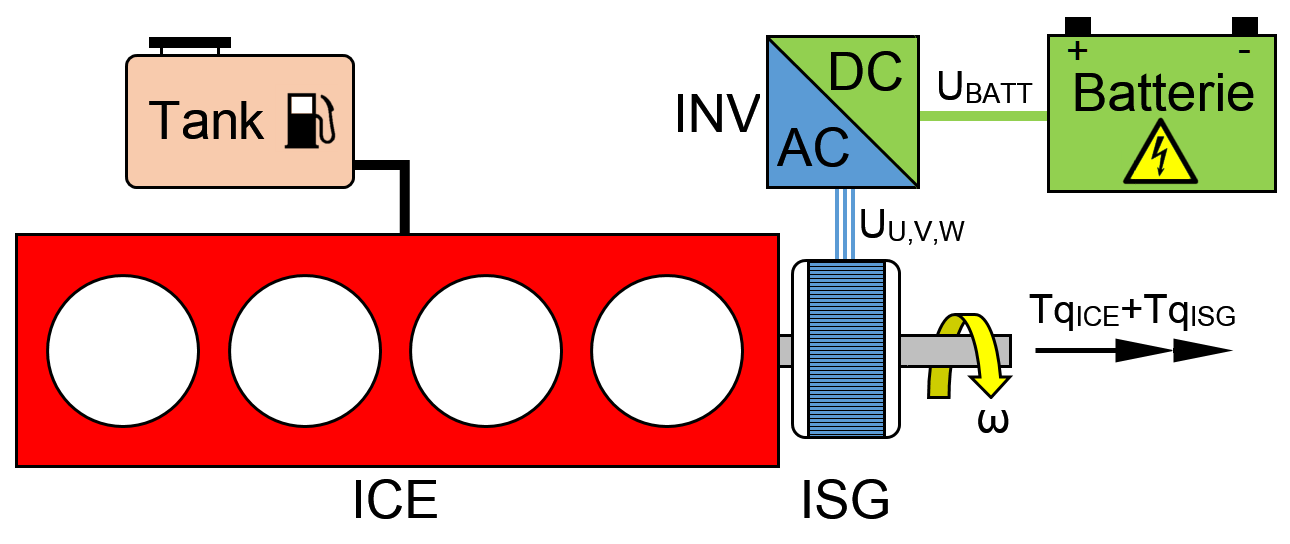
In conventional mobile machines, diesel engines are predominantly used today. Improving efficiency plays a central role in the development of a new alternative drive concept, as the share of fuel consumption in TCO is very high compared to cars. In particular, the use of an electrified parallel hybrid propulsion system consisting of a 6-cylinder diesel engine compliant with the current European Emissions Legislation Level Euro IV (Directive 2004/26 / EC) in conjunction with an electric motor / generator unit and a high voltage traction battery ws examined. The basis for the optimization tasks were real working cycles of a wheel loader of the 215 kW performance class, which were recorded directly by various customers of an Austrian wheel loader manufacturer.
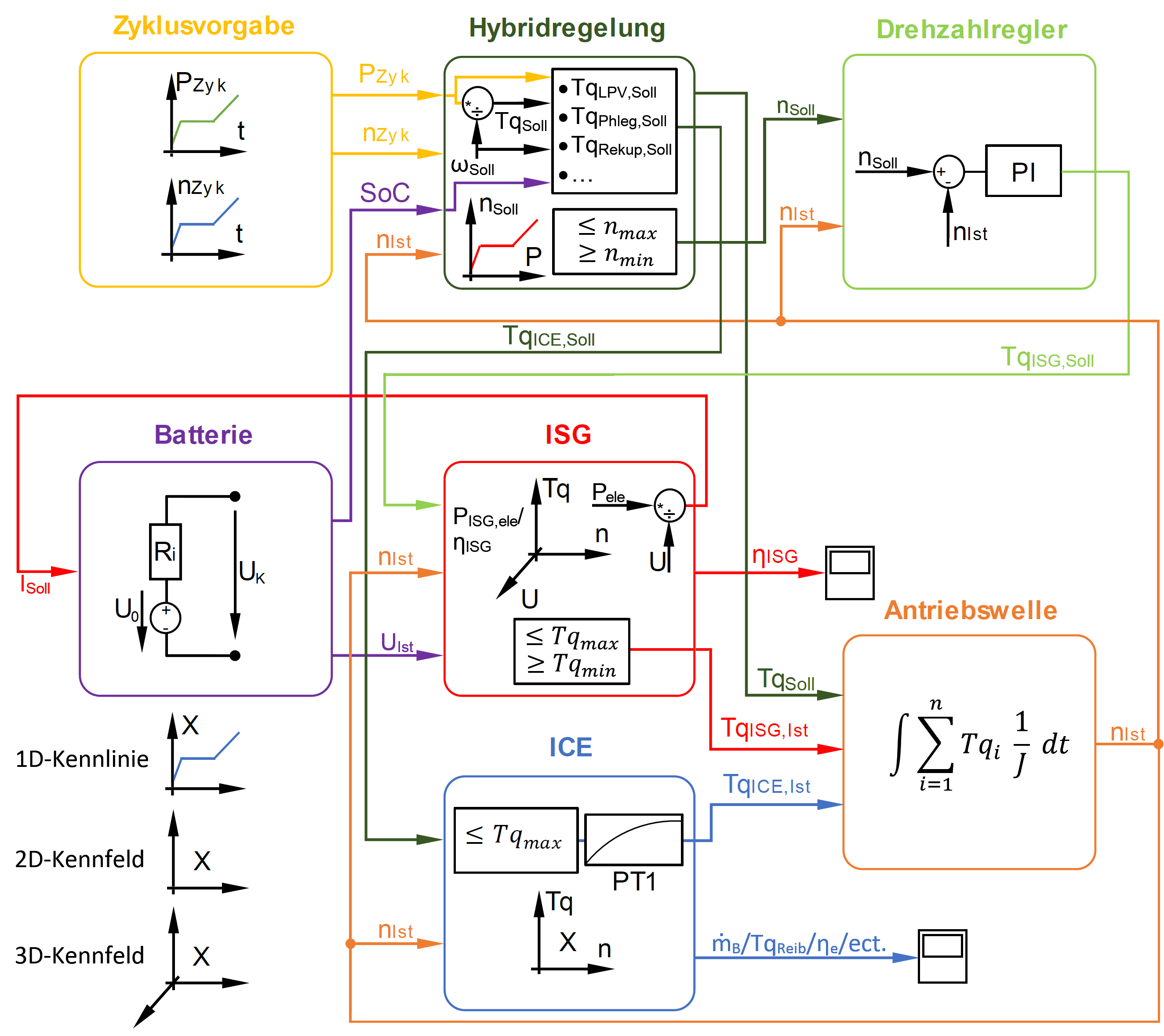
The operation of a hybrid drive requires the coordination of the individual drive components. The optimum distribution of the drive power to the internal combustion engine and the electric machine as well as the regulation of the operating speed level as a function of the current load level is effected via a central hybrid control system (HCU). This includes the energy management as well as the operating strategy. The development of the required functional software was carried out by means of a virtual development environment in the form of a real-time mapping of the system behavior of the hybrid drive. The software functional development of the HCU for controlling, regulating and monitoring the drive demanded the possibility of a simulation-supported complete check of the source code due to the short development times and fast achievement of the defined goals.
The use of a CAE-supported software development provided the opportunity to use MiL, SiL and HiL Methodes. The time required to achieve a high degree of maturity of the software could be kept short by using these development tools and methodology. Also, the experimental test effort in the subsequent validation phase on the engine test bench can be significantly reduced. Time-consuming development loops due to errors in the software functions can be detected and remedied at an early stage of development. The entire powertrain model, as well as the hybrid governor and energy management were implemented in the MathWorks MATLAB / SIMULINK program package.

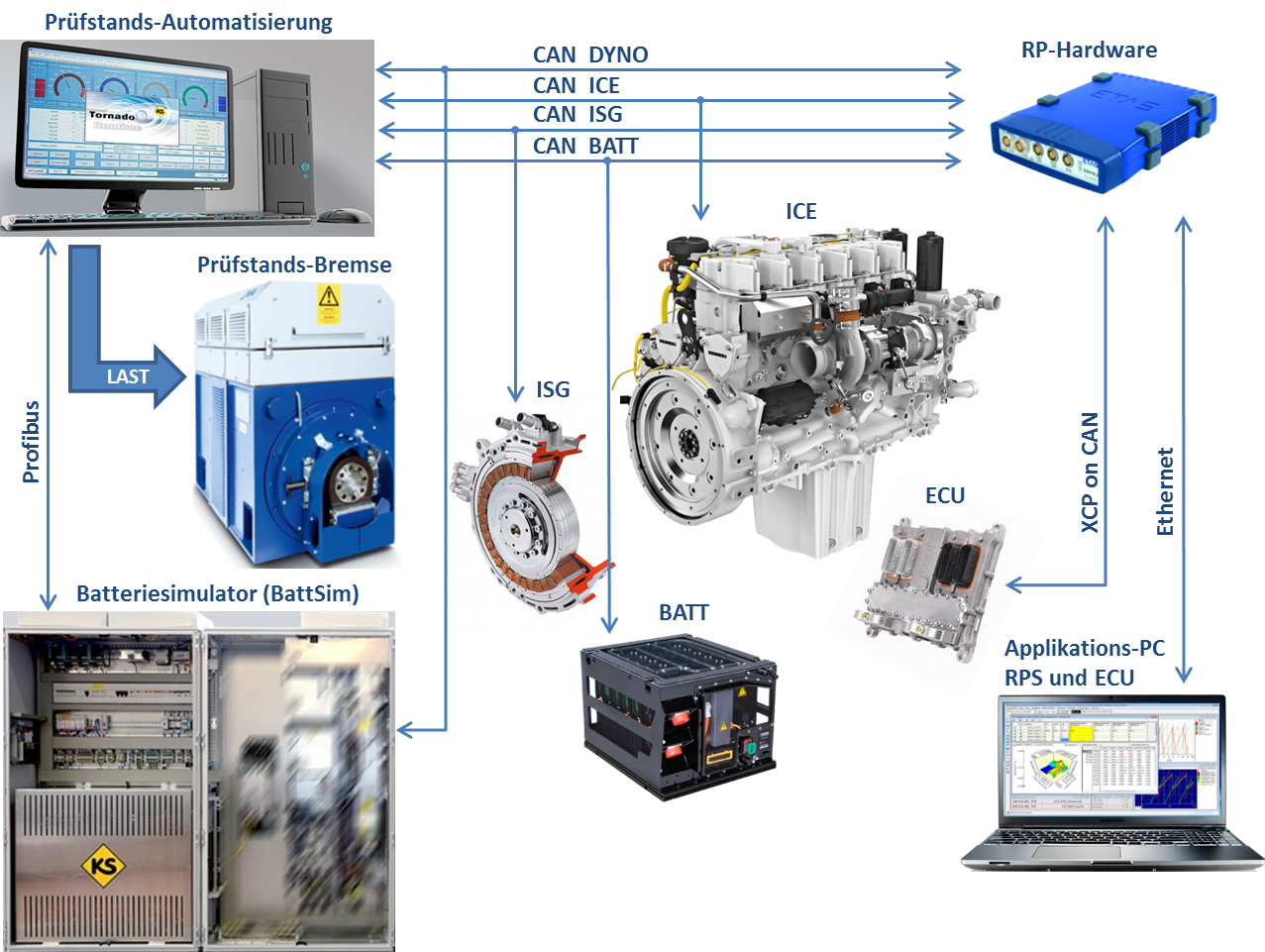
For the experimental investigations, the diesel-electric parallel hybrid drive was installed on a transient engine test bench within a specially developed HiL environment (hardware-in-the-loop environment) with RP system (rapid prototyping system) and battery simulator (BattSim) at the Institute of Internal Combustion Engines and Thermodynamics. The RP tool used was a ETAS product. Integration software was used to connect the software with the existing hardware. The communication between the components within the HiL environment was realized via CAN buses. The description of these interfaces as well as the parameterization of the real-time operating system (RTOS) and the compilation of the machine code were also carried out with the integration software. The RP hardware was a compact real-time platform with a corresponding interface module.